MIMIC est un projet qui vise a contrôler les robots CRS A255 d'une façon plus organique que la méthode offerte par le "Teach pendant" avec OpenCV et C++. Le principe est de filmer le bras de l'utilisateur avec une ou plusieurs caméras et d'interpréter les angles du bras pour ensuite les donner au robot. La librairie OpenCV sera utilisé pour traiter les images et extraire les angles et le bras sera mis en évidence par des bandes de ruban rouges. Un des objectifs secondaire est de montrer à l'utilisateur en temps réel les calculs effectué par le programme en utilisant les fonctions graphiques de OpenCV.
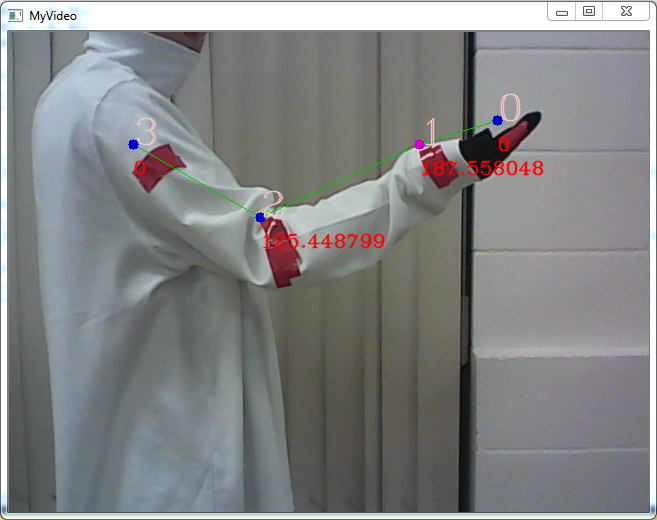
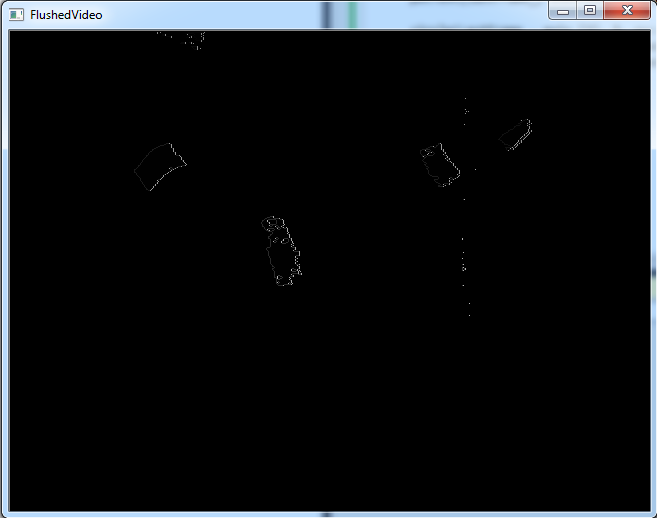
Vous pouvez voir ici les deux étapes du traitement vidéo. Tout d'abord l'image est purgée pour ne conserver que les contours des bandes rouges. Leurs positions sont ensuite enregistrées. On peut obtenir trois lignes qui simulent la position du bras de l'utilisateur. Les angles relatifs entre ces lignes sont les données qui nous permetterons de controller le robot.
Ce projet est réalisé par Alex Rousseau, étudiant en informatique industrielle au cégep lionel-groulx.
Pour me contacter